Сетевые дифференциальные поправки
Среди услуг точного позиционирования особый интерес имеют предоставляемые сетевые дифференциальные поправки для измерений в режиме RTK. Поправки от одиночной спутниковой дифференциальной станции распространяются и могут быть приняты подвижным спутниковым приемником на удалении до 300 км и даже больше, но при этом точность определяемых координат падает с удалением от дифференциальной станции [1]. Нарастающая с расстоянием погрешность определения местоположения в дифференциальном режиме возникает вследствие увеличения различия условий атмосферы (главным образом, ионосферы) над дифференциальной станцией и удаляющимся от нее спутниковым приемником, и погрешностей ее моделирования в момент работы пользователя. Сетевые поправки позволяют получать точные координаты на обширных площадях, избегая при этом нарастания погрешности определения местоположения и моделирования ионосферы и тропосферы.
Сетевые поправки создаются специальным алгоритмом программного обеспечения центра управления сетью с учетом спутниковых данных всех или нескольких дифференциальных станций в момент работы подвижного спутникового приемника. Зная точные координаты дифференциальных станций сети и используя непрерывно поступающие спутниковые данные с этих станций, программа центра управления с помощью алгоритма разрешения неоднозначности циклов биения фаз сигналов спутников находит мгновенные невязки координат для каждой из станций. На основе этих данных с помощью фильтра Калмана строится модель погрешностей определения местоположения в сети, которая учитывает мгновенное состояние атмосферы, погрешности часов и орбит спутников ГНСС. Эта модель необходима для формирования дифференциальных поправок, общих для всех станций сети. Сетевые дифференциальные поправки передаются пользователям в различных видах, которые применяются для вычисления точных координат его местоположения.
Виды сетевых поправок и их особенности
В настоящее время существуют различные способы создания сетевых RTK-поправок, предоставляемых разнообразными программными средствами различных производителей. По способу формирования различают два типа сетевых поправок: индивидуальные и неиндивидуальные [4]. Индивидуальные сетевые поправки позволяют получать точные координаты пользователя с учетом данных о его предварительном местоположении, переданных в центр управления. Обычно это абсолютные координаты, которые ГНСС-приемник пользователя определяет в навигационном режиме.
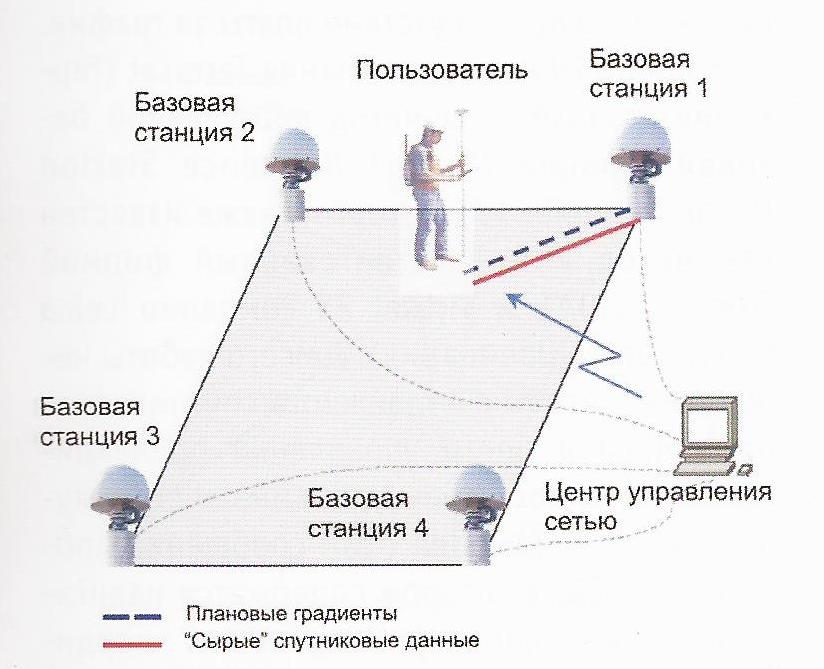
Метод площадных поправок (FKP)
Одним из первых методов представления сетевых спутниковых поправок является FKP (Flаchen-Korrektur Parameter) или метод площадных поправок, разработанный компанией Geo++ (Германия) в середине 1990-х гг. Данный метод подразумевает расчет дифференциальных поправок на площади, охваченной несколькими базовыми станциями без учета предварительного положения подвижного спутникового приемника. Сервер сети дифференциальных станций рассчитывает и предоставляет пользователю данные от одной из дифференциальных станций сети вместе с коэффициентами (площадными градиентами в плоскостях север-юг и восток-запад) зависимости погрешностей от расстояния относительно станций. Коэффициенты вычисляются на сервере центра управления, основываясь на предположении, что зависимые от расстояния погрешности определения местоположения внутри сети дифференциальных станций изменяются линейно. Однако с помощью простой линейной интерполяции не всегда можно учесть истинные погрешности в сети. Данные поправки могут применяться только в ограниченной области вокруг дифференциальной станции и не всегда обеспечивают высокое качество координат положения подвижного спутникового приемника. Однако метод FKP широко применяется, поскольку, как было сказано, не нуждается в предварительных данных о положении подвижного спутникового приемника. Данные передаются в сообщении 59 формата RTCM дополнительно к стандартным RTK-сообщениям RTCM 18, 19 или 20, 21 и могут быть предоставлены пользователям любым способом передачи данных, включая радиоканал. Достоинство поправок FKP, передаваемых по радиоканалу, заключается в том, что их может принимать любое количество подвижных спутниковых приемников при отсутствии платы за трафик.
Метод виртуальной базовой станции (VRS)
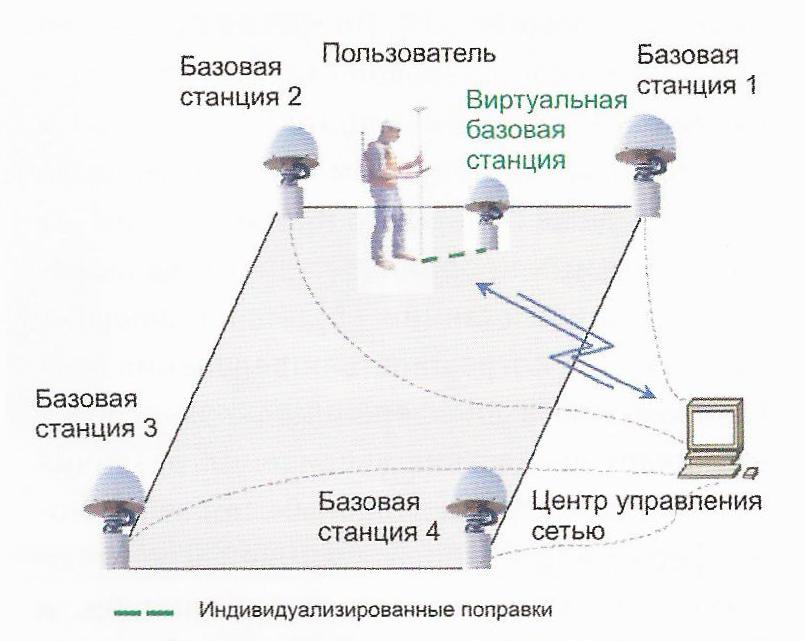
В конце 1990-х гг. компания Terrasat (Германия) разработала метод виртуальной дифференциальной станции (Virtual Reference Station Method — рис. 13), который также известен как метод VRS, запатентованный фирмой Trimble (США), и Virtual RS компании Leica Geosystems (Швейцария). Для его работы необходимо, чтобы с подвижного спутникового приемника в центр управления предварительно были сообщены координаты его текущего местоположения (GGA сообщение протокола NMEA, в котором содержатся навигационные координаты).
Получив эти координаты, программное обеспечение центра управления сети создает для пользователя дифференциальные поправки относительно виртуальной точки в пространстве, так называемой виртуальной дифференциальной станции, близкой к точке расположения подвижного спутникового приемника в данный момент времени, и отправляет их пользователю. Поправки могут быть посланы в сообщениях 20, 21 формата RTCM либо в собственных форматах производителя спутникового оборудования. Таким образом, каждый подвижный спутниковый приемник получает созданные специально для него индивидуальные поправки, используя которые, вычисляются точные координаты его местоположения так же, как и при определении координат по данным одиночной дифференциальной станции. При этом симулированная базовая станция находится рядом с подвижным спутниковым приемником пользователя, поскольку она создана специально для него. Метод VRS имеет как достоинства, так и недостатки. Достоинство метода в том, что он, естественно, позволяет свести к минимуму погрешности определения местоположения в режиме RTK, зависимые от расстояния до дифференциальной станции. Это также дает возможность пользователю работать с более дешевыми одночастотными спутниковыми приемниками, так как наличие данных от близко расположенной виртуальной дифференциальной станции позволяет не беспокоиться о потере точного решения из-за удаления от станции.
Однако существуют и недостатки метода виртуальной дифференциальной станции, например, когда подвижный спутниковый приемник перемещается от созданной для него виртуальной станции, точность определяемых координат падает. В этом случае возникает необходимость заново направлять свои текущие координаты в центр управления для создания новой виртуальной станции. Перевычисление точного местоположения (переинициализация) относительно новой виртуальной дифференциальной станции может сопровождаться скачкообразным изменением точности получаемых координат, что неприемлемо при геодезических измерениях. А при быстром перемещении подвижного спутникового приемника необходимость часто выполнять переинициализацию приводит к потере времени и снижению эффективности спутниковых измерений в режиме RTK.
Другой недостаток метода VRS заключается в том, что в его алгоритме для создания RTK-поправок относительно виртуальной дифференциальной станции обычно берутся данные только трех постоянно действующих дифференциальных станций, ближайших к подвижному спутниковому приемнику [5]. При этом учет погрешностей атмосферы (главным образом, ионосферы) выполняется локально, и возможность применения модели атмосферных условий, преобладающих над всей территорией сети, ограничена.
Существует разновидность метода VRS — метод псевдодифференциальной станции PRS (Pseudo-reference Station Method), в котором виртуальная станция создается на заданном расстоянии (например, 5 км) от текущего положения подвижного спутникового приемника.
Поправки, созданные с помощью методов VRS и PRS, относятся к индивидуальным сетевым RTK-поправкам.
Для передачи предварительной информации в центр управления и получения в ответ индивидуально сгенерированных поправок необходима система прямой и обратной связи между пользователем и центром управления. В данном случае наиболее подходит сотовая связь, поскольку метод VRS не работает, если сетевые поправки передаются пользователям по радиоканалу в режиме «вещания».
Метод MAX
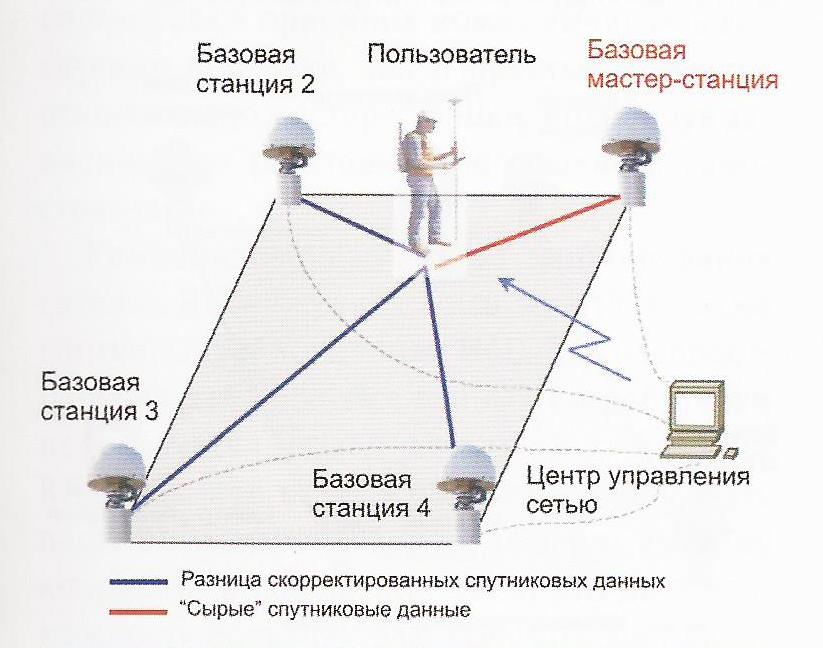
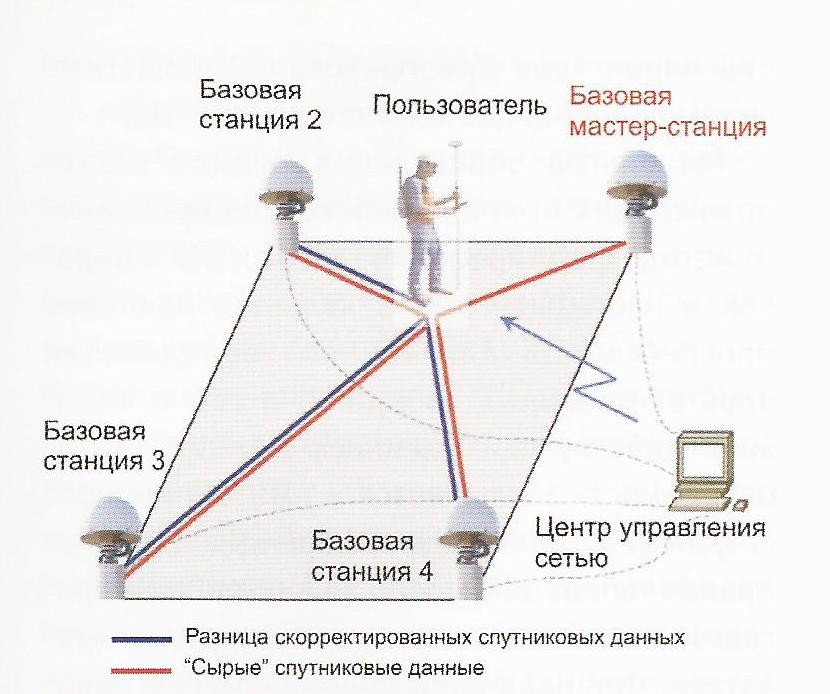
В 2001 г. компании Leica Geosystems и Geo++ [5] предложили новую концепцию создания RTK-поправок, называемую MAC (Master Auxiliary Concept). Согласно этой концепции сервер центра управления посылает подвижному спутниковому приемнику потоки данных, включающие «сырые» спутниковые наблюдения и координаты дифференциальной станции сети, называемой мастер-станцией (master station), и разности значений исправленных после разрешения неоднозначности «сырых» наблюдений и координат других дифференциальных станций сети (или нескольких станций ячейки сети), относительно данных мастер-станции [5]. Другие станции называют вспомогательными (auxiliary stations). Значения поправок вычисляются на подвижном спутниковом приемнике, для чего он должен иметь соответствующее программное обеспечение. Используя это ПО, в подвижном приемнике восстанавливаются значения исправленных после разрешения неоднозначности «сырых» спутниковых наблюдений для всех дифференциальных станций сети и определяются точные координаты его местоположения наилучшим образом. Метод создания поправок вышеописанным способом имеет название MAX (Master Auxiliary Corrections — рис. 4). Данные посылаются на подвижный спутниковый приемник в новом формате RTCM 3.0 или 3.1. Он учитывает возможность использования сигналов всех глобальных навигационных спутниковых систем, включая GPS и ГЛОНАСС. Компания Trimble разработала метод RTCM3Net, который соответствует концепции MAC.
Метод i-MAX
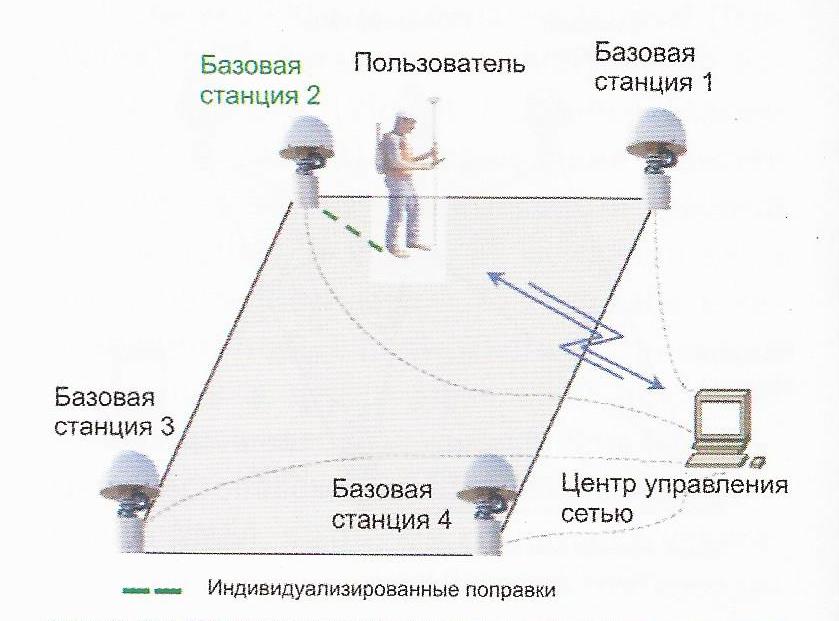
В то же время, для поддержки приемников старого образца, не имеющих возможности приема поправок типа MAX в новом формате RTCM 3.x., компания Leica Geosystems использует собственный метод i—MAX (Individualized MAX — рис. 15), формирующий индивидуальные поправки. Метод i-MAX очень близок к методу VRS, но отличается от метода виртуальной дифференциальной станции тем, что поправки для пользователя создаются относительно реальных, физически существующих дифференциальных станций сети. При этом спутниковые поправки формируются на основе данных дифференциальных станций, расположенных в ячейке сети, фиксированной или создаваемой автоматически программой центра управления после получения координат местоположения подвижного спутникового приемника. Подвижный спутниковый приемник получает индивидуальные поправки, с учетом оптимально подобранных станций сети, исходя из их удаленности, качества и объема спутниковой информации в текущий момент. Количество дифференциальных станций в ячейке не ограниченно и может быть любым. Поправки i-MAX могут быть переданы в форматах RTCM 2.x, и для их распространения необходима система прямой и обратной связи, такая как сотовая связь стандарта GSM или CDMA.
Преимущества и недостатки сетевых RTK-поправок
Описанные методы создания сетевых дифференциальных поправок для определения местоположения в режиме реального времени имеют различия, преимущества и недостатки. Но все они разработаны для одной цели: обеспечить пользователя спутниковых приемников корректирующими данными так, чтобы погрешности определяемых координат не зависели от удаления от станций сети и были постоянны в любой точке пространства внутри сети. Подвижный спутниковый приемник может работать на удалении до 50 км от ближайшей станции, а сети — покрывать значительные площади, при этом расстояние между дифференциальными станциями может достигать 80 км. При таких расстояниях между подвижным спутниковым приемником и дифференциальными станциями сети может возникнуть ситуация, когда их приемники будут принимать сигналы отличающихся по составу созвездий спутников ГНСС. В основе измерений в режиме RTK лежит тот факт, что подвижный спутниковый приемник и базовая станция должны одновременно принимать сигналы одного и того же созвездия спутников или, по крайней мере, четырех одинаковых спутников ГНСС. Именно данные спутников, совместно отслеживаемых в единый момент времени, служат для формирования RTK-поправок, в том числе и сетевых. По этой причине в сетях, состоящих из большого числа удаленных друг от друга дифференциальных станций, создание сетевых поправок может быть затруднено. Кроме того, применение сетевых поправок не является оптимальным при расположении подвижного спутникового приемника непосредственно рядом с дифференциальной станцией сети, особенно, когда сервер предоставляет только поправки типа VRS. Подвижный спутниковый приемник и близко расположенная дифференциальная станция могут иметь максимальное число одинаковых отслеживаемых спутников, но сетевые поправки будут формироваться только из числа совместно отлеживаемых спутников всеми станциями сети. В этом случае данные ряда спутников не будут использоваться. Сетевые алгоритмы могут применяться внутри сети, но создаваемые ими модели погрешностей позиционирования будут ошибочными за пределами области покрытия сети, где лучше применять стандартные несетевые поправки от ближайшей дифференциальной станции.
Формирование поправок путем комбинирования спутниковых данных
Также разработан новый метод для наиболее эффективного определения пространственных координат в дифференциальном режиме, который можно назвать комбинированным. Его анонсировала компания Leica Geosystems в апреле 2008 г., и он носит название SmartRTK . Суть метода заключается в том, что сервер сети постоянно действующих дифференциальных станций посылает всю имеющуюся информацию, включая «сырые» спутниковые наблюдения и координаты всех станций сети или ячейки сети [6]. Подвижный спутниковый приемник, получив данные сервера, вычисляет сетевые дифференциальные поправки и поправки относительно одной из выбранных дифференциальных станций, обычно ближайшей, а затем определяет свои координаты путем комбинации полученных решений с максимально эффективным использованием всех спутниковых данных для достижения наилучшего по точности результата позиционирования. Подвижный спутниковый приемник может вычислять как сетевые поправки, так и простые поправки относительно мастер-станции, моделируя зависимые от расстояния погрешности самостоятельно.
Метод SmartRTK
Комбинированный метод формирования сетевых RTK-поправок Leica SmartRTK также соответствует концепции MAC. Для распространения спутниковых данных потребителям используется новая версия 3.1 формата RTCM. Данная версия позволяет передавать параметры перехода в локальную систему координат в сообщении 1024. Это дает возможность пользователю получать координаты в местной системе координат без предварительного определения и загрузки в приемник параметров трансформации в местные системы координат из системы WGS-84.
Технология определения точного местоположения с применением комбинированного метода формирования сетевых RTK-поправок в настоящее время является наиболее прогрессивной для точного определения пространственных координат в сетях постоянно действующих дифференциальных станций. Но ее особенность заключается в том, что процесс создания и принятия дифференциальных поправок теперь закреплен за внутренним программным обеспечением аппаратуры пользователя. При наличии в подвижном спутниковом приемнике соответствующих функциональных возможностей необходимо только, чтобы программное обеспечение центра управления сетью обеспечивало его полным набором данных с дифференциальных станций.
Как видно из вышеизложенного, существует различные виды дифференциальных поправок, используемых для получения точных координат с помощью спутниковой аппаратуры в режиме реального времени в сетях постоянно действующих дифференциальных станций. Программное обеспечение центра управления сетью дифференциальных станций является одним из важных компонентов наземной инфраструктуры ГНСС для точного позиционирования. В зависимости от степени качества и сложности его реализации конкретным производителем, данное программное обеспечение может предоставлять поправки, сформированные различными способами. В настоящее время наиболее распространенным программным обеспечением для сетей спутниковых дифференциальных станций являются Leica GNSS Spider (Leica Geosystems), GNSMART (Geo++), VRS3Net (Trimble) и TopNET+ (Topcon).
Программное обеспечение центра управления сетью дифференциальных станций может поддерживать новые методы создания спутниковых RTK-поправок типа MAX либо разработанные ранее поправки VRS и FKP. Важно, чтобы при создании сети постоянно действующих дифференциальных станций ГНСС и выборе специализированных программных средств центра управления сетью, кроме требований потребителей, учитывались технические аспекты реализации сервиса точного позиционирования в режиме RTK, такие как существующие каналы связи и функциональные возможности приемников потенциальных пользователей сети в конкретном регионе.